Resolución del problema cinemático inverso en un robot SCARA mediante grupos de Assur
Autor(es) y otros:

Palabra(s) clave:
Robot SCARA
Grupos de Assur
Cinemática
Fecha de publicación:
Editorial:
Área de Ingeniería Mecánica Departamento de Ingeniería Mecánica Universitat Jaume I
Descripción física:
Resumen:
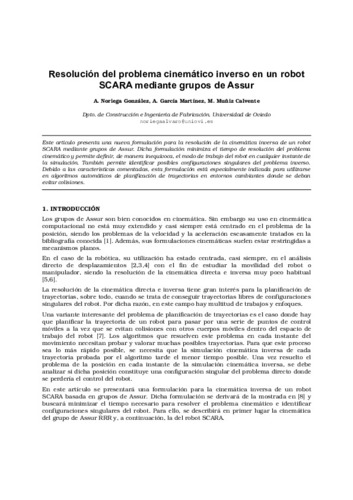
Este artículo presenta una nueva formulación para la resolución de la cinemática inversa de un robot SCARA mediante grupos de Assur. Dicha formulación minimiza el tiempo de resolución del problema cinemático y permite definir, de manera inequívoca, el modo de trabajo del robot en cualquier instante de la simulación. También permite identificar posibles configuraciones singulares del problema inverso. Debido a las características comentadas, esta formulación está especialmente indicada para utilizarse en algoritmos automáticos de planificación de trayectorias en entornos cambiantes donde se deban evitar colisiones
Descripción:
XIX Congreso Nacional de Ingeniería Mecánica, CNIM 2012, Castellón (España)
ISSN:
Colecciones
Ficheros en el ítem

Compartir

Estadísticas de uso
Metadatos
